FlexRay communication protocol

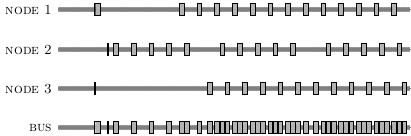
The FlexRay protocol is an automotive communication standard, which was designed to be reliable and time-triggered to support safety-critical applications in a car. A part of the controller was modelled using mCRL2 (adapted slightly to incorporate a notion of inheritance), and it was checked whether the start-up sequence always leads to a successfully communicating network, even if one node misbehaves. This is not the case. Resulting error traces were visualised as shown below.
Technical details
The parts of the Protocol Operation Control (POC) process of the FlexRay controller that are involved in the start-up protocol were modelled in full detail. For components other than the POC, more abstract models were introduced. Verification was then carried out for a 3-node network. The largest state space that was considered had around 26 million states and 76 million transitions.
- Type of verification
Deadlock, safety and liveness properties checking.
- Organizational context
- Contact person:
Sjoerd Cranen, Technische Universiteit Eindhoven, The Netherlands.
- Institution:
Technische Universiteit Eindhoven, The Netherlands
- Time period:
2012