Automated parking garage

Parking garages that stow and retrieve cars automatically are becoming viable solutions for parking shortages. However, these are complex systems and a number of severe incidents involving such garages have been reported. Many of these are related to safety issues in software. We applied verification techniques to develop a software design for an automated parking garage. This design meets a number of safety requirements. To do so we developed a software architecture that allows one to split implementation, safety and algorithmic aspects of the software. We also developed a custom visualization tool to assist us with our analysis. This enabled us to find a number of serious errors.
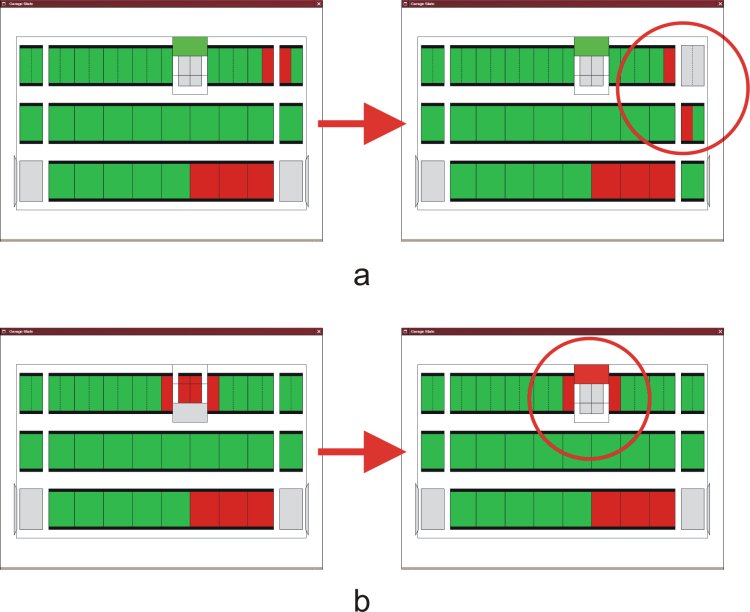
The visualization plug-in for the parking garage visualizes the garage as seen from the top. Using this tool we were able to identify a number of mistakes.
It was possible to tear a car in half with the shuttles toward the left and right of the parking garage.
It was possible to damage two cars using the lift.
Technical details
- Type of verification
A number of safety requirements were verified. Using a custom visualization tool, a number of errors that had not been specified as safety requirements were found.
- Data size
The original specification would have resulted in an estimated 640 billion states, making it prohibitively large. After a number of simplifications 3.3 million states were generated and verified.
- Equipment (computers, CPU, RAM)
Verification took 35 hours and 16 minutes on a single PC (3 GHz CPU, 4 GB RAM), and 5 hours and 38 minutes on a cluster of 34 CPUs (3 GHz CPU, 2 GB RAM).
- Models
The model is available as an appendix to the technical report mentioned in [MP07]. It is also distributed with the mCRL2 toolset.
- Organizational context
- Contact person:
Aad Mathijssen, Technische Universiteit Eindhoven, The Netherlands.
- Other people involved:
Hannes Pretorius, Technische Universiteit Eindhoven, The Netherlands.
- Institution:
Technische Universiteit Eindhoven, The Netherlands.
- Industrial partner:
CVSS Parking Systems, Eindhoven, The Netherlands
- Time period:
June 2005 – December 2005